
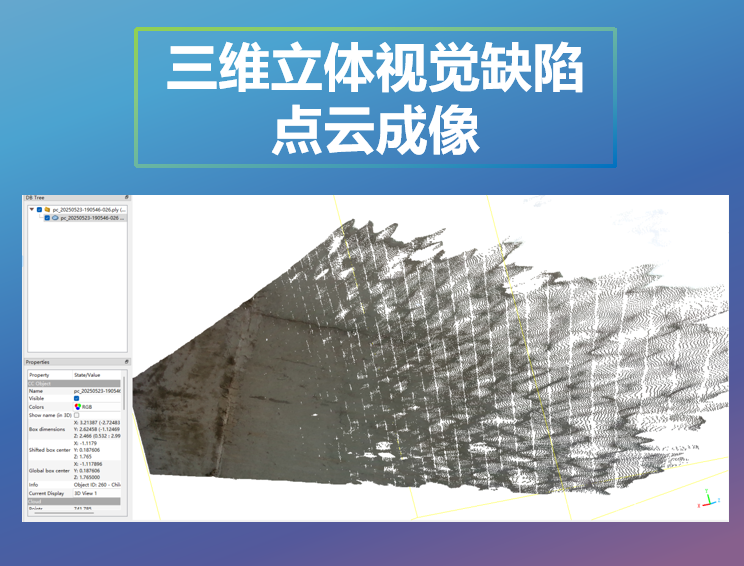
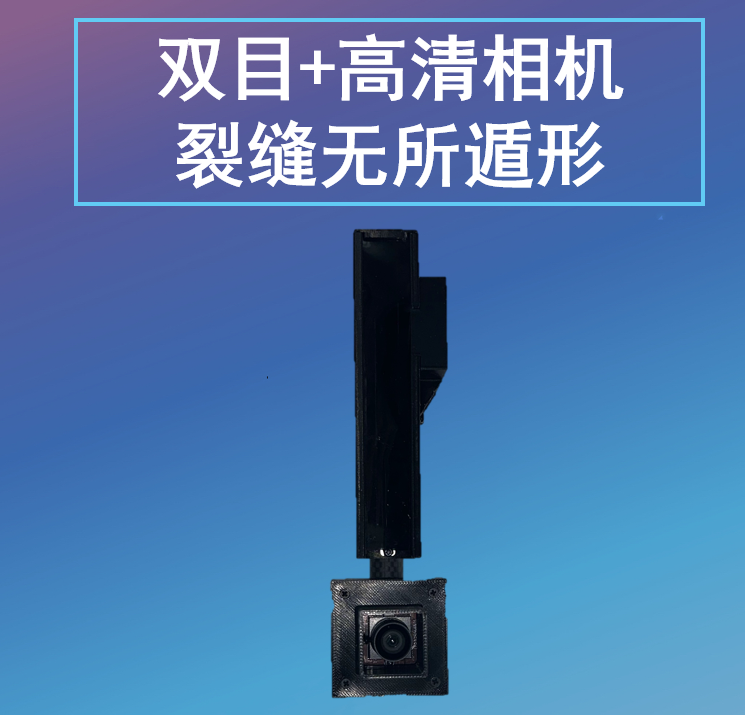
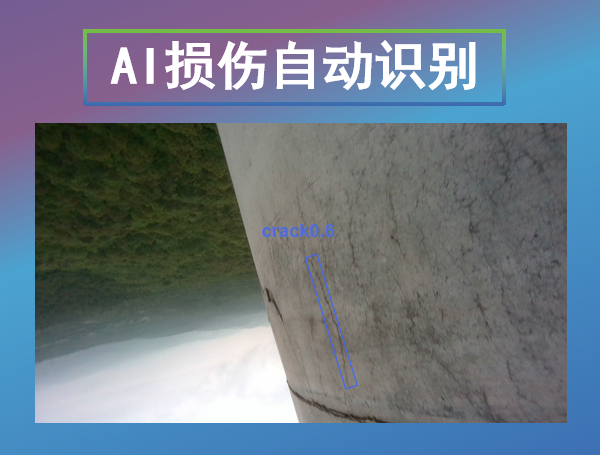




FV-03采用绳驱桨吸构型,适用于大坝、风电混塔内外壁、桥墩桥塔、外墙等高空场景,可稳定贴附并移动于垂直表面。搭载扫描式立体视觉相机,实现高效精准识别及量化裂缝等缺陷,并生成局部点云三维模型;搭载厘米级定位模块,能够精准定位损伤位置。具备实时图传与远程控制,具备断电自动防坠保护机制。
本款机器人配套遥控软件为“爬壁机器人控制终端”,主要应用于配套遥控器控制机器人运动以及相机数据采集,并实时显示机器人状态。