







本型号专为二次开发设计,采用先进负压吸附技术,可牢固附着于混凝土、粉刷墙、玻璃等表面,适应垂直或倾斜作业环境,独特的涡流斜向推进设计轻松跨越2cm缝隙。可搭载Jestson Orin NX 机载计算,提供100TOPS AI算力,并预留外部负载挂载接口,高效赋能科研与智能开发。
SC-06是专为科研二次开发量身打造的高性能吸附式机器人平台,其核心设计理念聚焦于为智能算法开发和创新应用研究提供极致开放的实验载体。采用模块化架构设计,集成先进负压吸附系统与涡流斜向推进器,不仅可在混凝土、玻璃等复杂表面实现多维姿态作业(垂直/倾斜/倒置),更能以独创的2cm缝隙跨越能力为移动算法研究提供真实挑战场景。科研级算力配置方面,原生支持Jetson Orin NX旗舰级边缘计算模块,提供100TOPS AI算力冗余,并开放全部传感器数据接口与运动控制API。特别设计的可扩展负载舱支持二次开发套件快速集成,预留的Type-C/GPIO/UART等标准化接口可直接对接激光雷达、机械臂等科研常用外设,其吸附底盘亦可作为移动机器人通用开发平台使用。
本款机器人配套遥控为基础遥控器,主要用于控制机器人运动等。
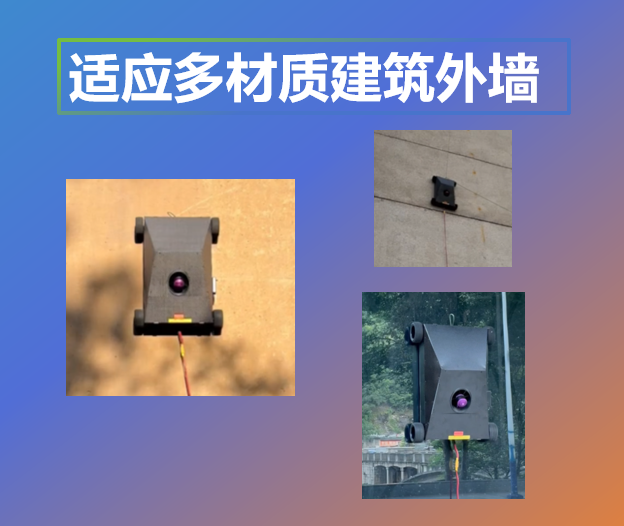
本型号是专为复杂表面检测设计的智能设备,采用先进的负压吸附技术,可牢固附着于混凝土、粉刷墙、玻璃等表面,适应垂直或倾斜作业环境。特殊的涡流斜向推进设计。能够轻松跨越2cm缝隙,机器人搭载高精度视觉系统,配备高清摄像头能够实时捕捉表面细节,精准检测裂纹、腐蚀等缺陷,并通过无线实时传输将数据同步至控制终端。
本型号是专为复杂表面检测设计的智能设备,采用先进的的负压吸附技术,可牢固附着于混凝土、粉刷墙、玻璃等表面,适应垂直或倾斜作业环境。特殊的涡流斜向推进设计,能够轻松跨越2cm缝隙,机器人搭载高精度视觉系统,配备高清摄像头能够实时捕捉表面细节,精准检测裂纹、腐蚀等缺陷,并通过无线实时传输将数据同步至控制终端。
SC-07专为复杂表面检测设计的智能设备,采用先进的负压吸附技术,可牢固附着于混凝土、粉刷墙、玻璃等表面,适应垂直或倾斜作业环境。特殊的涡流斜向推进设计,能够轻松跨越2cm缝隙,机器人搭载高精度视觉系统,配备高清摄像头能够实时捕捉表面细节,精准检测裂纹、腐蚀等缺陷,并通过无线实时传输将数据同步至控制终端
本款机器人配套遥控为Android系统带屏遥控器,用于远程控制机器人运动以及实时图像画面显示。